Tag: 1010
GoPro Slider with MakerBeam parts
Stefan from ConstrAct in Austria sent us a new MakerBeam project: a GoPro slider. For the frame 600mm MakerBeam (10x10mm) was used. The linear slide, also 600mm, was attached on top. It is driven by Arduino Nano with some additional parts from his 3D printer and CNC mill.
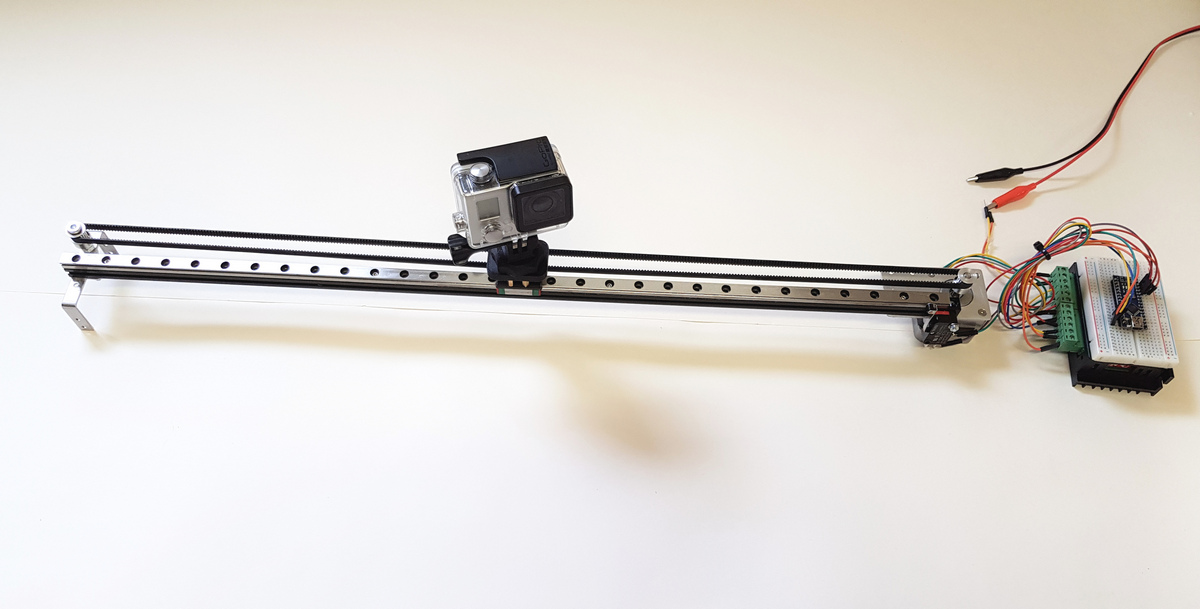
Below is a small video that shows the slider in action.
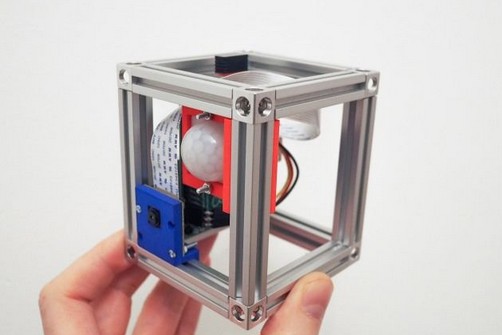
Rotating cube
Stefan Gschroefl from ConstrAct sent us a few pictures from his rotating MakerBeam cube. It looks great.
The cube is made using MakerBeam. It now holds pictures of MakerBeam items and projects. Stefan is planning to attend the MakerFaire in Vienna in early May.

The rotation platform is custom 3D printed and runs slow. The rotation platform is powered by battery or external power source. It can be used for other things since the cubeholder itself is magnetic mounted.


Team MakerBeam
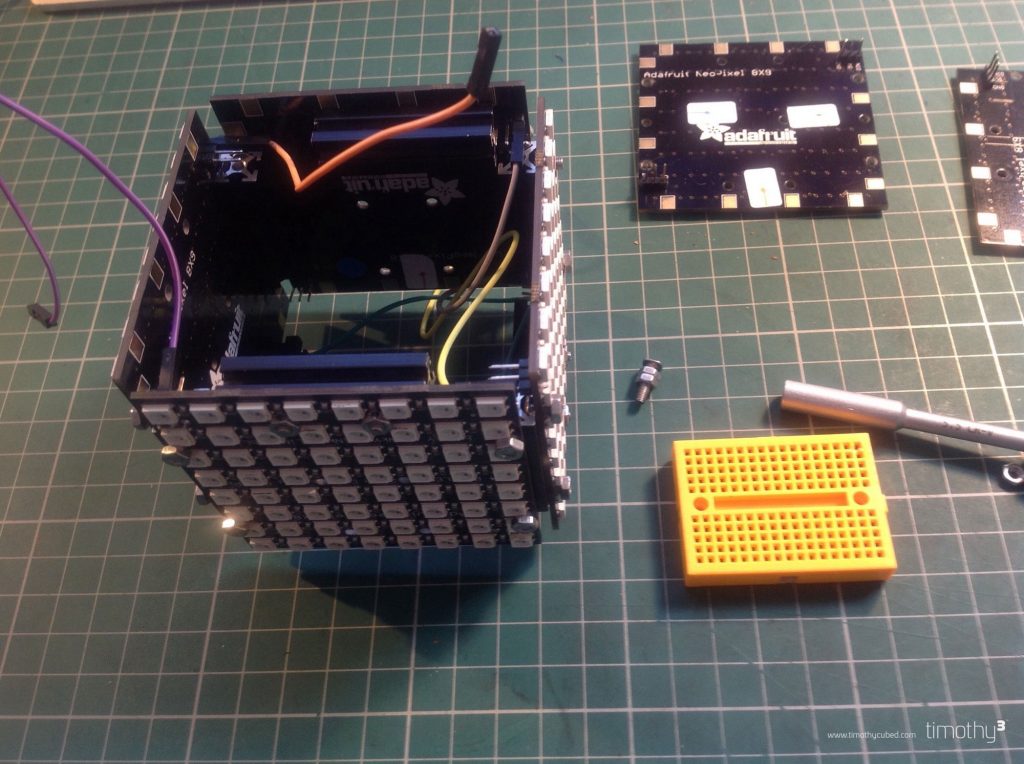
Light cubes – Arduino, Adafruit NeoPixel and MakerBeam
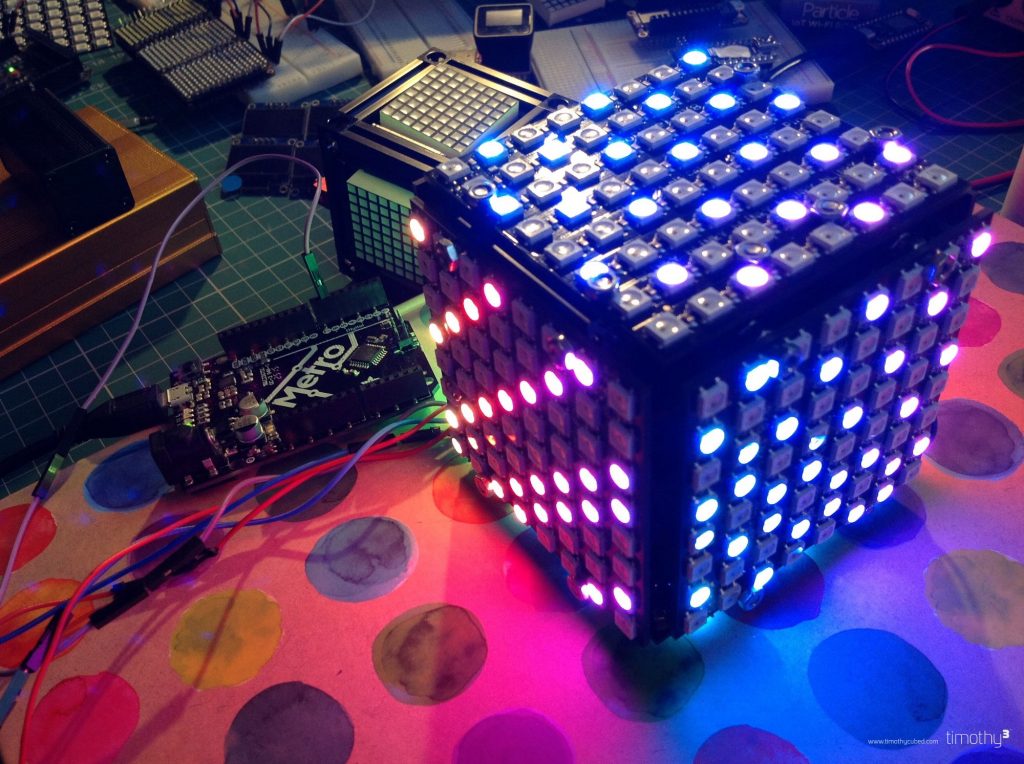
Timothy sent us a blog post with all the details of his project. In his project he uses MakerBeam to combine arduino and 8×8 Neopixel matrices by Adafruit. In his blog post, Art, Electrons and Computation, you can read more about his MakerBeam project. Also he added some great pictures that show his building process.
You can read his blog post here: https://medium.com/@timothy_cubed/art-electrons-and-computation-a91abd827026#.8k4t62ibt
Below you can find some more pictures of his project.
![]()
Team MakerBeam
New outfit for Panther (UPDATE)
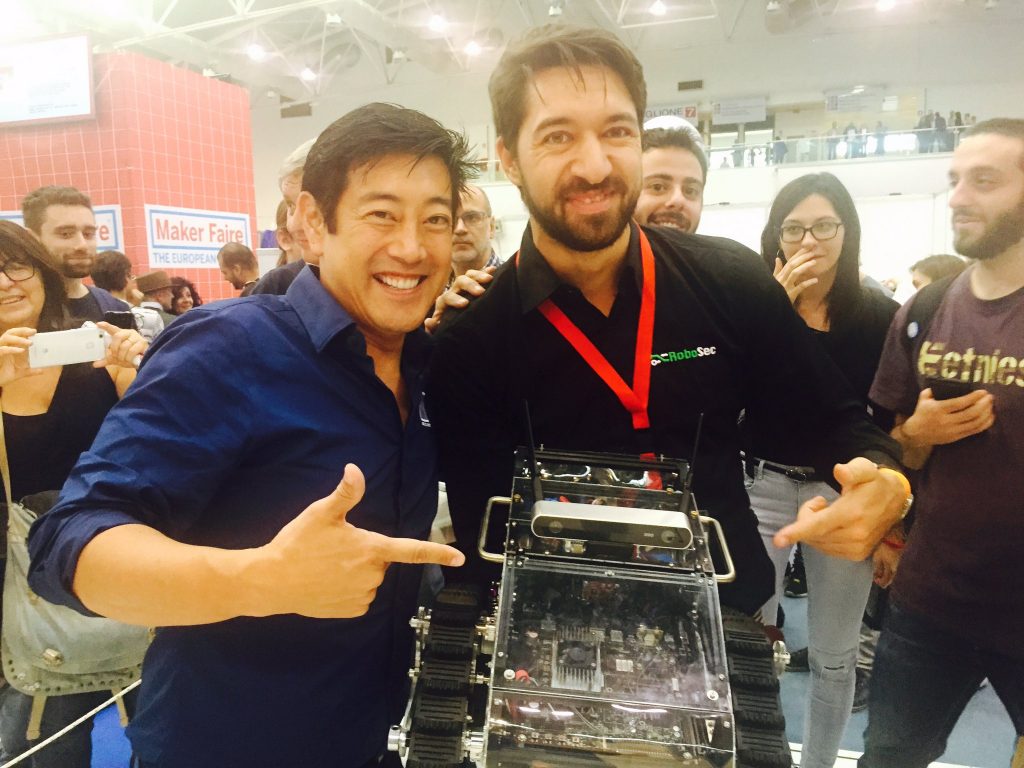
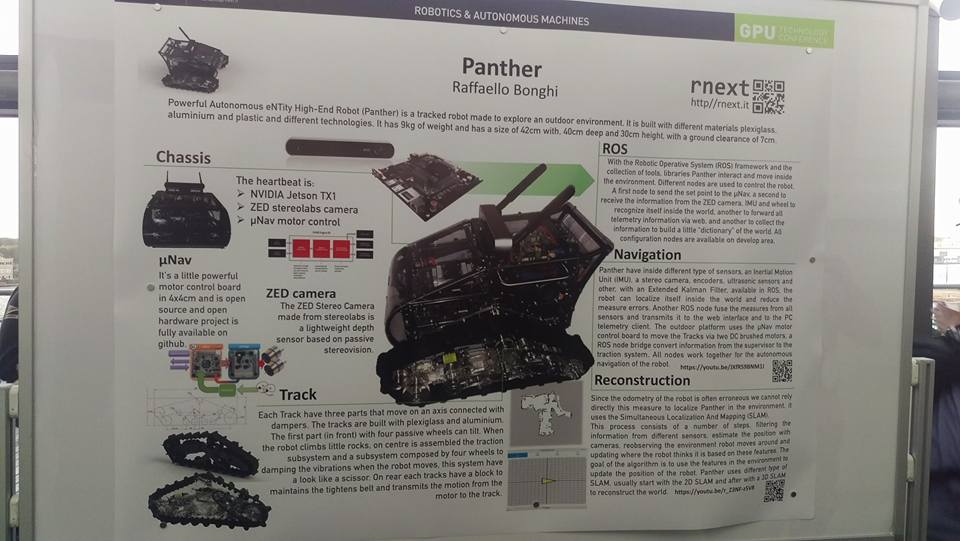
Update: @Raffaello86 travelled around with Panther. Raffaello and his Powerful Autonomous eNTity High-End Robot were present at MakerFaire Tokyo in August and there was a poster presentation of PANTHER closer to our home. In September the GPU Technology Conference was held (GTCEU16) in Amsterdam. Close to Raffaelo’s home he presented Panther at MakerFaire Rome where he met met Grant Imahar (Mythbusters).
blog post from May 6, 2016:
We received great pictures through Twitter (@makerbeam) about a really nice robotics project from @Raffaello86.
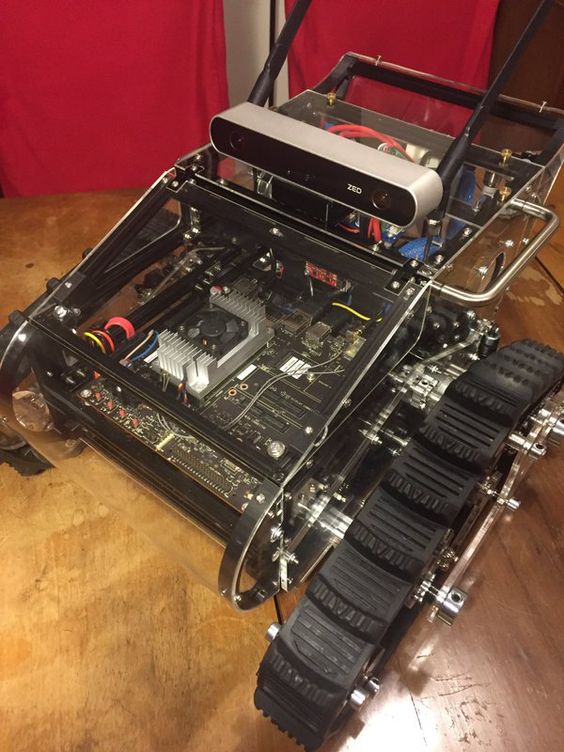
From @raffaello86 we received an update of a MakerBeam project through Twitter (@makerbeam). New outfit for #PANTHER Total black yellow damper. #GoROS @OSRFoundation powered on #JetsonTX1 Officine Robotiche
A later tweet (Aug. 6, 2016) reads as follows: Hello everybody! #Panther and #Dude are in #MakerFaireTokyo2016 @NVIDIAJapan @NVIDIA_IT @NVIDIATegra
Here is a link to a website all about PANTHER – Code Name: RUDE.



Deskbreeze on Kickstarter
Deskbreeze is a lightweight and simple wind tunnel for teaching aerodynamics to children and adults.
Last summer, Gerhard’s daughter attended a sailing course for children. She was six years old and would enter school the following autumn. She could not read and write and therefore had trouble understanding the written course materials and the graphics. So Gerhard thought about a vivid method to explain to her the basics of aerodynamics for sailing.
Gerhard built a wind tunnel of cardboard and straws, attached to a little fog machine. It worked well, but wasn’t perfect. Through several iterations he developed a stable and simple wind tunnel, into which you can put different objects. With a simple turntable and wires you can change courses and the position of sails, for example.
Deskbreeze uses fans and honeycomb cores to create a laminar flow, and dry ice for the visualization of the airflows.
For more information please visit the Kickstarter website: Link to Kickstarter video
Team MakerBeam
Raspberry Pi Security System with Motion Detection / Camera
A security system that detects the mobile phones of the home occupants in order to avoid switching it on and off. This home made project uses Raspberry Pi, motion detection and naturally MakerBeam.
One of the main goals was to have the system completely automatic. No turning it on or off when leaving or arriving home. The easiest way to achieve this was to try and detect the mobile phones of the home occupants. Conceptually this was quite simple but in practice it was the most challenging part.
You can read the complete Bill of Materials in the full article. Continue reading on hackster.io about this project with raspberry pi.
Here is the link:
https://www.hackster.io/FutureSharks/raspberry-pi-security-system-with-motion-detection-camera-bed172
Team MakerBeam
Robot drawing portrait – Arduino & processing & opencv
My search for plotters made with MakerBeam led me to an older project. A project that we had never seen before so here it is.
Have fun watching!
Team MakerBeam
X/Y Plotter with Input from Webcam – Arduino processing
In a search for more input on plotters built with MakerBeam I stumbled on another video. Have fun watching!
For more info you can also read about the build in more detail here: http://www.piedcode.com/xy-plotter-using-webcam-input/
Team MakerBeam
Eigenbau-plotter
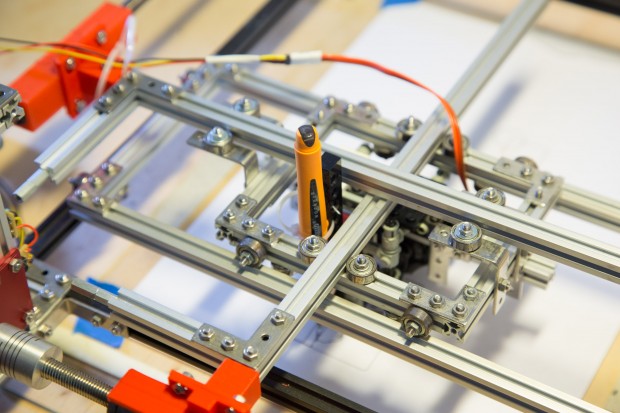
Here is an article featuring a plotter built with MakerBeam. The article is in German, but the pictures in it plus the video give a very good impression of the plotter.
To the article: http://www.golem.de/news/anleitung-selbstgebaute-maschinen-steuern-1510-116331.html
Team MakerBeam